EECS 442: Computer Vision (Winter 2024)
Homework 1 – Numbers and Images
Important: Changes to rubric and submission format announced on Piazza @58 .
Instructions
This homework is due at 11:59 p.m. on Wednesday January 31st, 2024.
The submission includes two parts:
-
To Canvas: submit a
zipfile containing a single directory with your uniqname as the name that contains all your code (subdirectories are fine).- We have indicated questions where you have to do something in code in red. If gradecope asks for it, also submit your code in the report with the formatting below.
Starter code is given to you on Canvas under the “Homework 1” assignment. You can also download it here. Clean up your submission to include only the necessary files.
Submission Tip: Use the Tasks Checklist and Canvas Submission Checklist at the end of this homework. We also provide a script that validates the submission format here.
-
To Gradescope: submit a
pdffile as your write-up, including your answers to all the questions and key choices you made.- We have indicated questions where you have to do something in the report in green. Some coding questions also need to be included in the report.
The write-up must be an electronic version. No handwriting, including plotting questions. \(\LaTeX\) is recommended but not mandatory.
For including code, do not use screenshots. Generate a PDF using a tool like this or using this Overleaf LaTeX template. If this PDF contains only code, be sure to append it to the end of your report and match the questions carefully on Gradescope.
Python Environment
Consider referring to the Python standard library docs when you have questions about Python utilties.
We recommend you install the latest Anaconda for Python 3.12. This is a Python package manager that includes most of the modules you need for this course. We will make use of the following packages extensively in this course:
Overview
In this assignment, you’ll work through three tasks that help set you up for success in the class as well as a short assignment involving playing with color. The assignment has three goals.
- Show you bugs in a low-stakes setting. You’ll encounter a lot of programming mistakes in the course and we want to show you common bugs early on. Here, the programming problems are deliberately easy!
- Learn to write reasonably good Python and NumPy code. Having layers of nested
forloops will cause bugs and is not feasible for us to debug, use NumPy effectively! If you have not had any experience with NumPy, read this tutorial before starting.
The assignment has four parts and corresponding folders in the starter code:
- Numpy Intro (folder
numpy/) - Data Interpretation and Visualization (folder
visualize/) - Lights on a Budget (folder
dither/) - Colorspaces
Numpy Intro
All the code/data for this is located in the folder numpy/. Each assignment requires you to fill in the blank in a function (in tests.py and warmup.py) and return the value described in the comment for the function. There’s driver code you do not need to read in run.py and common.py.
Note: All the python below refer to python3. As we stated earlier, we are going to use Python 3.12 in this assignment. Python 2 was sunset on January 1, 2022.
- (40 points) Fill in the code stubs in tests.py and warmups.py. Put the terminal output in your pdf from:
$ python run.py --allwarmups
$ python run.py --alltests
Do I have to get every question right? We give partial credit: each warmup exercise is worth 2% of the total grade for this question and each test is worth 3% of the total grade for this question.
Tests Explained
When you open one of these two files, you will see starter code that looks like this:
def sample1(xs):
"""
Inputs:
- xs: A list of values
Returns:
The first entry of the list
"""
return None
You should fill in the implementation of the function, like this:
def sample1(xs):
"""
Inputs:
- xs: A list of values
Returns:
The first entry of the list
"""
return xs[0]
You can test your implementation by running the test script:
python run.py --test w1 # Check warmup problem w1 from warmups.py
python run.py --allwarmups # Check all the warmup problems
python run.py --test t1 # Check the test problem t1 from tests.py
python run.py --alltests # Check all the test problems
# Check all the warmup problems; if any of them fail, then launch the pdb
# debugger so you can find the difference
python run.py --allwarmups --pdb
If you are checking all the warmup problems (or test problems), the perfect result will be:
python run.py --allwarmups
Running w1
Running w2
...
Running w20
Ran warmup tests
20/20 = 100.0
Warmup Problems
You need to solve all 20 of the warmup problems in warmups.py. They are all solvable with one line of code.
Test Problems
You need to solve all 20 problems in tests.py. Many are not solvable in one line. You may not use a loop to solve any of the problems, although you may want to first figure out a slow for-loop solution to make sure you know what the right computation is, before changing the for-loop solution to a non for-loop solution. The one exception to the no-loop rule is t10 (although this can also be solved without loops).
Here is one example:
def t4(R, X):
"""
Inputs:
- R: A numpy array of shape (3, 3) giving a rotation matrix
- X: A numpy array of shape (N, 3) giving a set of 3-dimensional vectors
Returns:
A numpy array Y of shape (N, 3) where Y[i] is X[i] rotated by R
Par: 3 lines
Instructor: 1 line
Hint:
1) If v is a vector, then the matrix-vector product Rv rotates the vector
by the matrix R.
2) .T gives the transpose of a matrix
"""
return None
What We Provide
For each problem, we provide:
- Inputs: The arguments that are provided to the function
- Returns: What you are supposed to return from the function
- Par: How many lines of code it should take. We don’t grade on this, but if it takes more lines than this, there is probably a better way to solve it. Except for t10, you should not use any explicit loops.
- Instructor: How many lines our solution takes. Can you do better? Hints: Functions and other tips you might find useful for this problem.
Walkthroughs and Hints
Test 8: If you get the axes wrong, numpy will do its best to make sure that the computations go through but the answer will be wrong. If your mean variable is \(1 \times 1\), you may find yourself with a matrix where the full matrix has mean zero. If your standard deviation variable is \(1 \times M\), you may find each column has standard deviation one.
Test 9: This sort of functional form appears throughout data-processing. This is primarily an exercise in writing out code with multiple nested levels of calculations. Write each part of the expression one line at a time, checking the sizes at each step.
Test 10: This is an exercise in handling weird data formats. You may want to do this with for loops first.
- First, make a loop that calculates the vector
C[i]that is the centroid of the data inXs[i]. To figure out the meaning of things, there is no shame in trying operations and seeing which produce the right shape. Here we have to specify that the centroid is M-dimensions to point out how we wantXs[i]interpreted. The centroid (or average of the vectors) has to be calculated with the average going down the columns (i.e., rows are individual vectors and columns are dimensions). - Allocate a matrix that can store all the pairwise distances. Then, double for loop over the centroids i and j and produce the distances.
Test 11: You are given a set of vectors \(\xB_1, \ldots, \xB_N\) where each vector \(x_i \in \mathbb{R}^M\). These vectors are stacked together to create a matrix \(\XB \in \mathbb{R}^{N \times M}\). Your goal is to create a matrix \(\DB \in \mathbb{R}^{N \times N}\) such that \(\DB_{i,j} = \|\xB_i - \xB_j\|\). Note that \(\|\xB_i - \xB_j\|\) is the L2-norm or the Euclidean length of the vector. The useful identity you are given is that \(\|\xB-\yB\|^2 = \|\xB\|^2 + \|\yB\|^2 - 2\xB^T \yB\). This is true for any pair of vectors \(\xB\) and \(\yB\) and can be used to calculate the distance quickly.
At each step, your goal is to replace slow but correct code with fast and correct code. If the code breaks at a particular step, you know where the bug is.
- First, write a correct but slow solution that uses two for loops. In the inner body, you should plug in the given identity to make \(\DB_{i,j} = \|\xB_i\|^2 + \|\xB_j\|^2 - 2 \xB_i^T \xB_j\). Do this in three separate terms.
- Next, write a version that first computes a matrix that contains all the dot products, or \(\PB \in \mathbb{R}^{N \times N}\) such that \(\PB_{i,j} = \xB_i^T \xB_j\). This can be done in a single matrix-matrix operation. You can then calculate the distance by doing \(\DB_{i,j} = \|\xB_i\|^2 + \|\xB_j\|^2 - 2\PB_{i,j}\).
- Finally, calculate a matrix containing the norms, or a \(\NB \in \mathbb{R}^{N \times N}\) such that \(\NB_{i,j} = \|\xB_i\|^2 + \|\xB_j\|^2\). You can do this in two stages: first, calculate the squared norm of each row of \(\XB\) by summing the squared values across the row. Suppose \(\SB\) is this array (i.e., \(\SB_{i} = \|\xB_i\|^2\) and \(\SB_{i} \in \mathbb{R}^{N}\)), but be careful that you look at the shape that you get as output. If you compute \(\SB + \SB^T\), you should get \(\NB\). Now you can calculate the distance inside the double for loop as \(\DB_{i,j} = \NB_{i,j} - 2 \PB_{i,j}\).
- The double for loop is now not very useful. You can just add/scale the two arrays together elementwise.
Test 18: Here you draw a circle by finding all entries in a matrix that are within \(r\) cells of a row \(y\) and column \(x\). This is a not particularly intellectually stimulating exercise, but it is practice in writing (and debugging) code that reasons about rows and columns.
- First, write a correct but slow solution that uses two for loops. In the inner body, plug in the correct test for the given i, j. Make sure the test passes; be careful about rows and columns.
- Look at the documentation for
np.meshgridbriefly. Then call it withnp.arange(3)andnp.arange(5)as arguments. See if you can create two arrays such thatIndexI[i,j] = iandIndexJ[i,j] = j. - Replace your test that uses two for loops with something that just uses
IndexIandIndexJ.
Data Interpretation and Visualization
Throughout the course, a lot of the data you have access to will be in the form of an image. These won’t be stored and saved in the same format that you’re used to when interacting with ordinary images, such as off your cell phone: sometimes they’ll have negative values, really really big values, or invalid values. If you can look at images quickly, then you’ll find bugs quicker. If you only print debug, you’ll have a bad time. To teach you about interpreting things, I’ve got a bunch of mystery data that we’ll analyze together. You’ll write a brief version of the important imsave function for visualizing.
Let’s load some of this mysterious data.
>>> X = np.load("mysterydata/mysterydata.npy")
>>> X
array([[[0, 0, 0, ..., 0, 0, 1],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0]],
... (some more zeros) ...
[[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0]]], dtype=uint32)
Looks like it’s a bunch of zeros. Nothing to see here folks! For better or worse: Python only shows the sides of an array when printing it and the sides of images that have gone through some processing tend to not be representative.
After you print it out, you should always look at the shape of the array and the data type.
>>> X.shape
(512, 512, 9)
>>> X.dtype
dtype('uint32')
The shape and datatype are really important. If something is an unexpected shape, that’s really bad. This is similar to doing a physics problem where you’re trying to measure the speed of light (which should be in m/s), and getting a result that is in gauss. The computer may happily chug along and produce a number, but if the units or shape are wrong, the answer is almost certainly wrong. The datatype is also really important, because data type conversion can be lossy: if you have values between 0 and 1, and you convert to an integer format, you’ll end up with 0s and 1s.
In this particular case, the data has height 512 (the first dimension), width 512 (the second), and 9 channels (the last). These order of dimensions here is a convention, meaning that there are multiple equivalent options. For instance, in other conventions, the channel is the first dimension. Generally, you’ll be given data that is \(HxWxC\) and we’ll try to be clear about how data is stored. If later on, you’re given some other piece of data, figuring out the convention is a bit like rotating a picture until it looks right: figure out what you expect, and flip things until it looks like you’d expect.
If you’ve got an image, after you print it, you probably want to visualize the output.
We don’t see in 9 color channels, and so you can’t look at them all at once. If you’ve got a bug, one of the most important things to do is to look at the image. You can look at either the first channel or all of the channels as individual images.
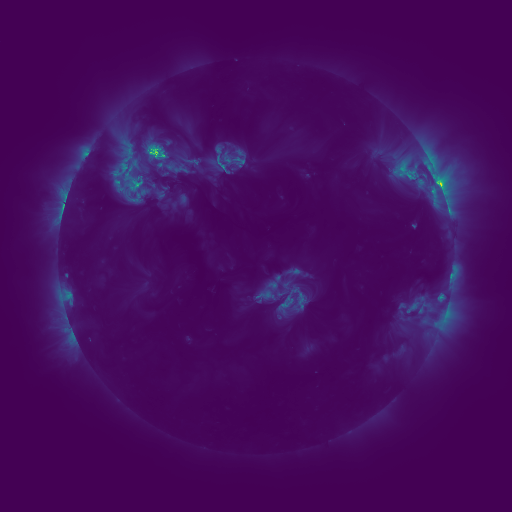
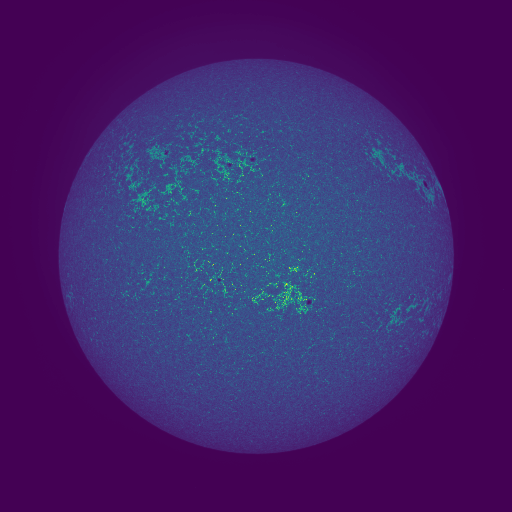
>>> plt.imsave("vis.png",X[:,:,0])
You can see what the output looks like in Figure 1. This is a false color image. Given the image, you want to find the minimum value (vmin) and the maximum value (vmax) and assign colors based on where each pixel’s value falls between those. These colors look like: Low 
High. plt.imsave finds vmin and vmax for you on its own by computing the minimum and maximum
of the array.
If you’d like to look at all 9 channels, save 9 images:
>>> for i in range(9):
... plt.imsave("vis_%d.png" % i,X[:,:,i])
If you’re inside a normal python interpreter, you can do a for loop. If you’re inside a debugger, it’s sometimes hard to do a for loop. If you promise not to tell your programming languages friends, you can use side effects to do a for loop to save the data.
(Pdb) [plt.imsave("vis_%d.png" % i,X[:,:,i]) for i in range(9)]
[None, None, None, None, None, None, None, None, None]
The list of Nones is just the return value of plt.imsave, which saves stuff to disk and returns a None.
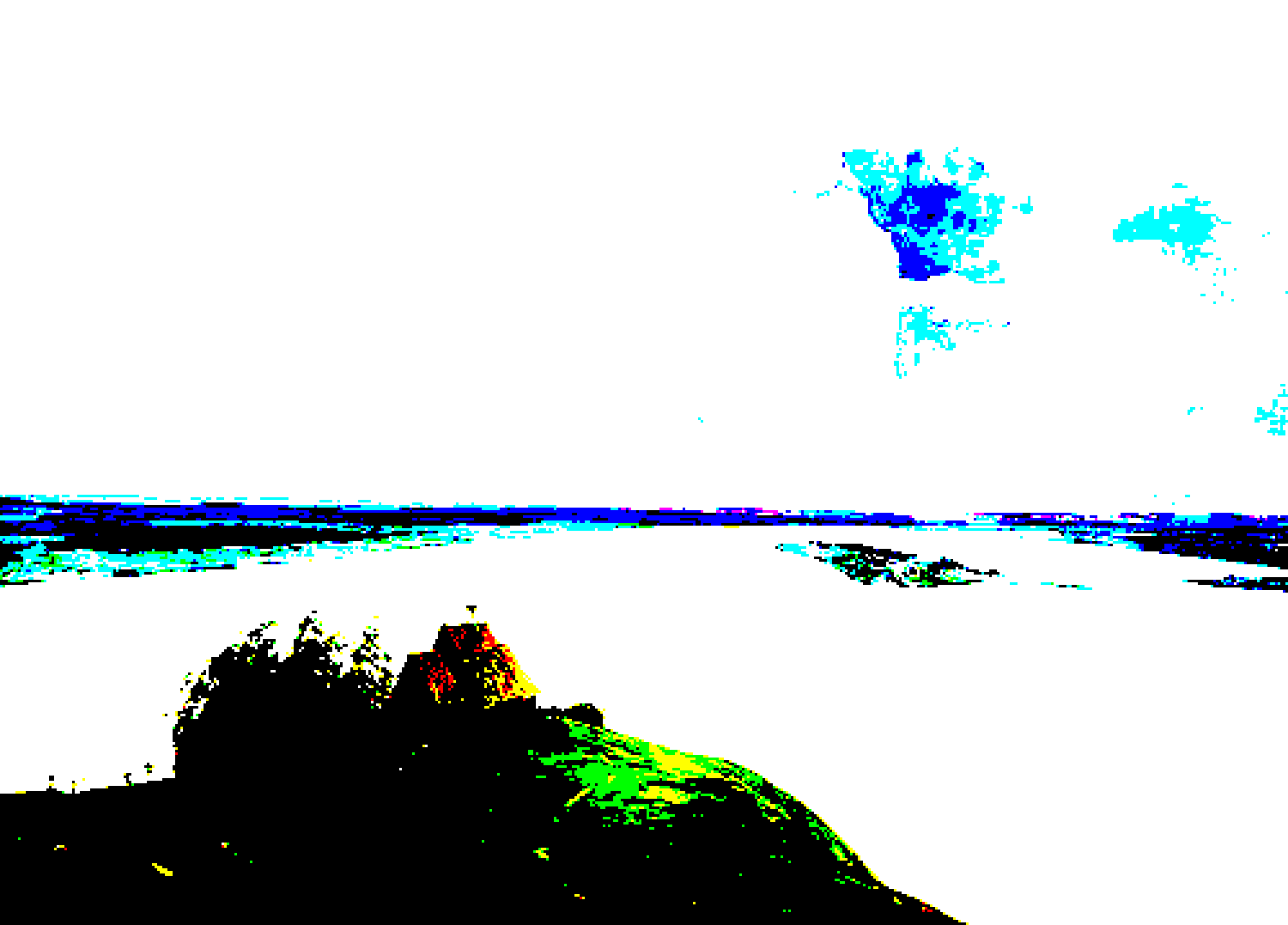
If you’d like to change the colormap, you can specify this with cmap. For instance,
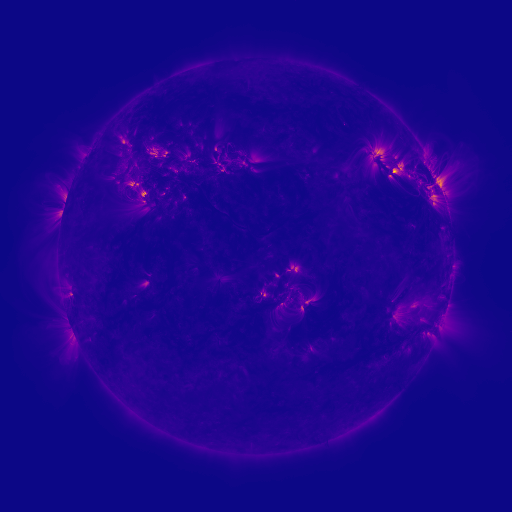
>>> for i in range(9):
... plt.imsave("vis_%d.png" % i,X[:,:,i],cmap='plasma')
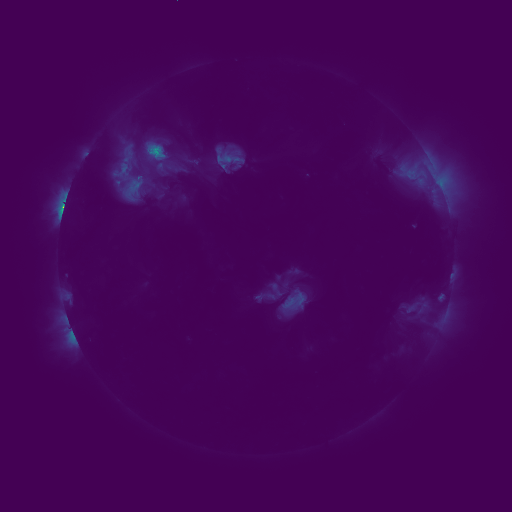
produces the outputs in Figure 2. These use the plasma colormap which looks like: Low 
High.
Pixel Value Ranges


-
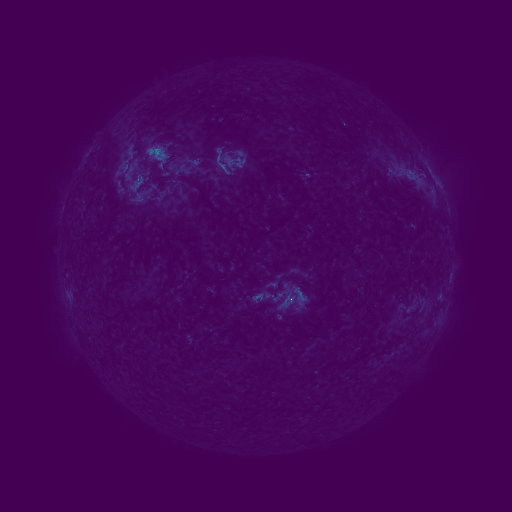
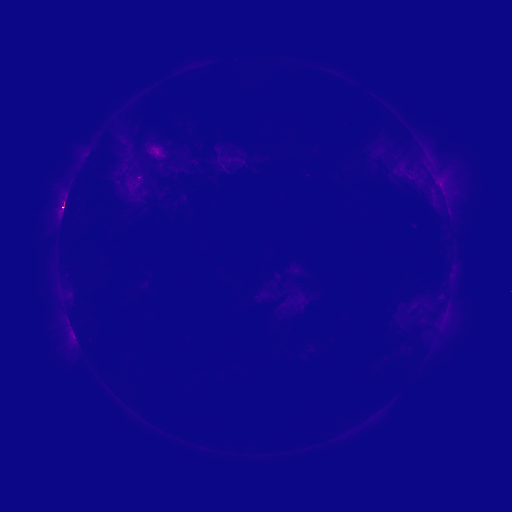
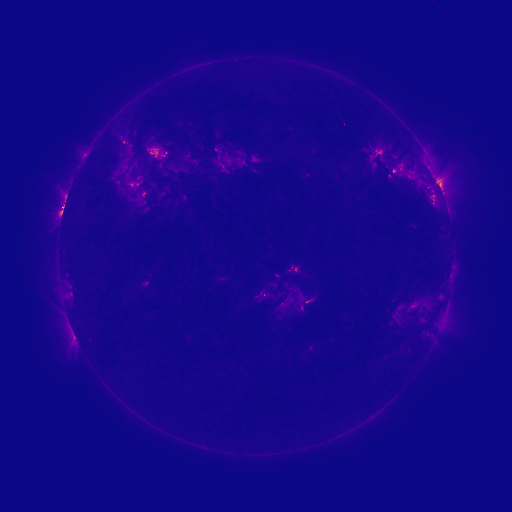
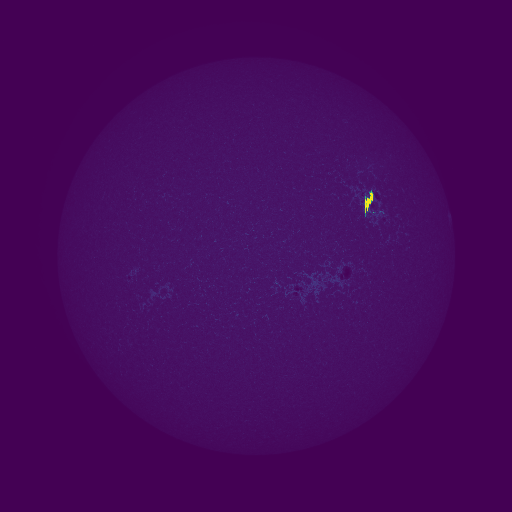
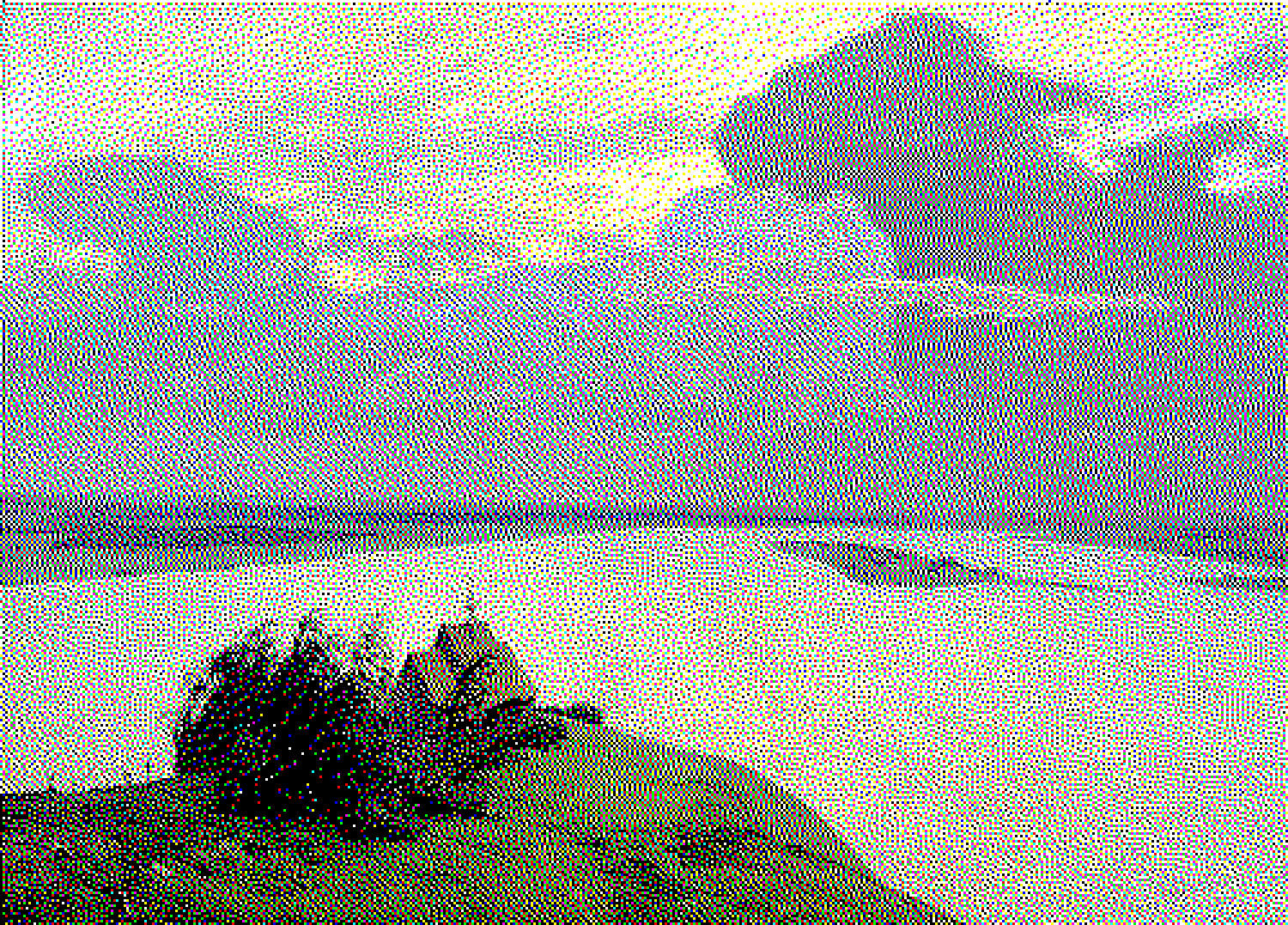
(2 points) Try loading
\[p^\gamma \ \textrm{with}\ \gamma \in [0,1] \quad\textrm{or}\quad \log(p) \quad\textrm{or}\quad \log(1+p)\]mysterydata2.npyand visualizing it. You should get something like Figure 3. It’s hard to see stuff because one spot is really bright. In this case, it’s because there’s a solar flare that’sproducing immense amounts of light. A common trick for making things easier to see is to apply a nonlinear correction. Here are a few options:where the last one can be done with
np.log1p. Apply a nonlinear correction to the second mystery data and visualize it. Put two of the channels i.e.X[:,:,i]as images into the report. You can stick them side-by-side.
Invalid Pixel Values
Let’s try this again, using one of the other data.
>>> X = np.load("mysterydata/mysterydata3.npy")
>>> for i in range(9):
... plt.imsave("vis3_%d.png" % i,X[:,:,i])
The results are shown in Figure 4. They’re all white. What’s going on?
If you’ve got an uncooperative piece of data that won’t visualize or produces buggy results, it’s worth checking to see if all the values are reasonable. One option that’ll cover all your cases is np.isfinite, which is False for values that are NaN (not a number) or \(\pm \infty\) and True otherwise. If you then take the mean over the array, you get the fraction of entries that are normal-ish. If the mean value is anything other than 1, you may be in trouble. Here:
>>> np.mean(np.isfinite(X))
0.6824828253851997
Alternatively, this also works:
>>> np.sum(~np.isfinite(X))
749117
Other things that check things are np.isnan (which returns True for NaNs) and np.isinf (which returns True for infinite values). Even a single NaN in your data is a problem: any number that touches another NaN turns into a NaN. The totally white values happen because plt.imsave tries to find vmin/vmax,
and the minimum of a value and a NaN is a NaN. The resulting color is a NaN as well. If you’ve got NaNs in your data, many functions you may want to use (e.g., mean, sum, min, max, median, quantile) have a “nan” version.
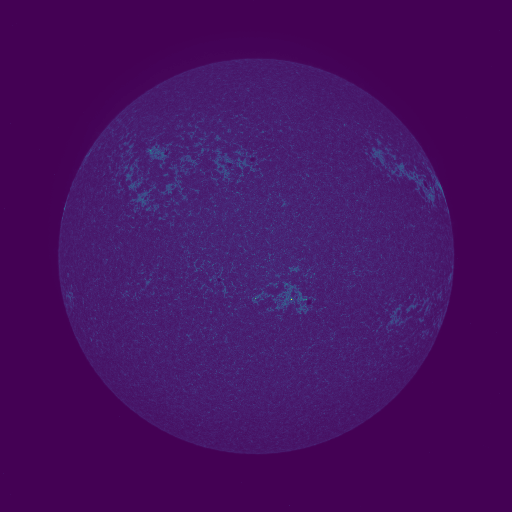
- (2 points) Fix the images by determining the right range (use
np.nanmin,np.nanmax) and then pass arguments intoplt.imsaveto set the range for the visualization. To figure out what arguments to set, look at the documentation forplt.imsave. Put two images frommysterydata3.npyin the report.
Rolling Your Own plt.imsave
You’ll make your own plt.imsave by filling in colormapArray. Here’s how the false color image works:
You’re given a \(H \times W\) matrix \(X\) and a colormap matrix \(C\) that is \(N \times 3\) where each row is a color red/green/blue. You produce a \(H \times W \times 3\) matrix \(O\). Each scalar-valued pixel \(X[i,j]\) gets converted into red/green/blue values for \(O[i,j,:]\) following this rule: if the pixel has value \(v\) the corresponding output color comes from a row determined by (approximately)
However, you’ll have to be very careful – this precise equation won’t always work. As an exercise – can you spot something that might cause the expression to be a NaN?
-
(3 points) Fill in
colormapArray. To test, you’ll have to write some calling code in the main part. You can use eitherplt.imsaveorcv2.imwriteto save the image to an file. Include source code in the report. -
(3 points) Visualize
mysterydata4.npyusing your system without it crashing and put all nine images into your report. You may have to make a design decision about what to do about results that are undefined. If the results are undefined, then any option that seems reasonable is fine. Your colormap should look similar to Figure 2. If the colors look inverted, see Beware 3!
Beware:
- There are a bunch of edge cases in the equation for the color: it won’t always return an integer between \(0\) and \(N-1\). It will also definitely blow up under certain input conditions (also, watch the type).
- You’re asked by the code to return a
HxW uint8image. There are a lot of shortcuts/implied sizes and shapes in computer vision notation – since this is aHxWcolor image, it should have 3 channels (i.e., beHxWx3). Since it’suint8, you should make the image go from \(0\) to \(255\) before returning it (otherwise everything gets clipped to \(0\) and \(1\), which correspond to the two lowest brightness settings). Like all other jargon, this is annoying until it is learned; after it is learned, it is then useful. - If you choose to save the results using opencv, you may have blue and red flipped –
opencvassumes blue is first and the rest of the world assumes red is first. You can identify this by the fact that the columns of the are defined as Red/Green/Blue and there is a lot of blue and not much red in the lowest entry.
Lights on a Budget
The code and data for this are located in dither/. This contains starter code dither.py, an image gallery gallery/. Some of these images are very high resolution, so we are providing a copied that has been downsampled to be \(\le 200\) pixels in gallery200/. We’re also providing sample outputs for all algorithms in bbb/.
While modern computer screens are typically capable of showing 256 different intensities per color (leading to \(256^3 = 16.7\) million possible color combinations!) this wasn’t always the case. Many types of displays are only capable of showing a smaller number of light intensities. Similarly, some image formats cannot represent all \(256^3\) colors: GIFs, for instance, can only store 256 colors.







You’ll start out with a full byte of data to work with and will be asked to represent the image with a smaller number of bits (typically 1 or 2 bits per pixel).
Input: As input the algorithm will get:
- A \(H \times W\) floating point image with brightness ranging from 0 to 1, and
- A palette consisting of all the \(K\) allowed brightness settings (each floats in the range 0 to 1).
Output: As output, each algorithm produces a \(H \times W\) uint8 image with brightness ranging from \(0\) to \(K-1\).
We’ll call this a quantized image. You can take the palette and the quantized image and make a new image via ReconstructedImage[y,x] = Palette[QuantizedImage[y,x]]. Note that the array you get from numpy will get be indexed by y (or row) first and then by x (or column). The goal of the algorithm is to find a quantized image such that it is close to the reconstructed image. While this doesn’t technically save us space if implemented naively, we could further gain savings by using \(\log_2(K)\) bits rather than the \(8\) bits.
The Rest of the Homework: You’ll build up to Floyd-Steinberg Dithering. You’ll:
- Start with a really naive version;
- Do Floyd-Steinberg;
- Add a resize feature to the starter code;
- Handle color;
- (optionally) Handle funny stuff about how monitors display outputs.
You’ll be able to call each implementation via a starter script dither.py that takes as arguments a source folder with images, a target image to put the results in, and the function to apply to each. For instance if there’s a function quantizeNaive, you can call
$ python dither.py gallery/ results/ quantizeNaive
and the folder results will contain the outputs of running quantizeNaive on each. There will also be a file view.htm that will show all the results in a table. The starter code contains a bunch of helper functions for you to use.
Important: There are two caveats for verifying your results.
- Web browsers mess with images. Set your zoom to 100%. The images are outputted so that each pixel in the original image corresponds to a few pixels in the output image (i.e., they’re upsampled to deliberately be blocky). Try opening
bbb/view.htm. The outputsquantizeFloydandquantizeFloydGammashould look like BBB. ThequantizeNaiveoutputs should look bad. - Due to slight variations in implementations, your outputs may not look bit-wise identical to these outputs. You can check your results by inspection by comparing them visually to our provided outputs.
Naive Approach
The simplest way to make an image that’s close is to just pick the closest value in the palette for each pixel.
-
(10 points) 2 coding, 3 report questions.
-
First, fill in
quantize(v,palette)in the starter code.This should return the index of the nearest value in the palette to the single value
v. Note that we’re making this general by letting it take a palette. For speed this would normally done by pre-selecting a palette where the nearest entry could be calculated fast. Do this without a for-loop. Look atnp.argmin. Indeed, the beauty of the Internet is that if you search for “numpy find index of smallest value”, you’ll likely find this on your own. In general, you should feel free to search for numpy documentation or for whether there are functions that will make your life easier. -
(2 points) Second, fill in
quantizeNaive(IF,palette)in the starter code. Include source code in the report.This takes a floating point image of size HxW and a palette of values. Create a new uint8 matrix and use quantize() to find the index of the nearest pixel. Return the
HxW uint8image containing the palette indices (not values!). Once you’ve done this, you can callpython dither.py gallery200 results quantizeNaiveto see the results. Open upview.htm. You can sort of recognize the images, but this is not an aesthetically pleasing result. If you change--numbitsyou can control the size of the palette.Beware:
At this stage, many people naturally want to do something like
output = IF, which gives you an array that’s as big as the input. Keep in mind that when you getIFas an argument, you are getting a reference/address/pointer! If you modify that variable, the underlying data changes.Allocate a new matrix via
output = np.zeros(IF.shape,dtype=np.uint8). Otherwise, this is like asking to copy your friends’ notes, and then returning them with doodles all over them. -
(2 points) If you apply this to the folder
gallery, why might your code (that calls quantize) take a very long time? (1 sentence) -
(2 points) Pause the program right after
algoFn(the function for your dithering algorithm) gets called. Visualize the values in the image withplt.imsaveorplt.imshow. These produce false color images. The default colormap inmatplotliblooks like: Low High. You should notice that something is different about the intensity values after they’ve been converted to the palette.Do low intensity values correspond to low palette values? Explain (1 sentence) what’s going on. You may have to look through the code you’re given (a good habit to get into).
-
(4 points) Put two results of inputs from
galleryand corresponding outputs in your answer document. Useaep.jpgplus any other one that you like. While you can play with--num-bitsto get a sense of how things work, you should have--num-bitsset to1for the output.
-
Floyd-Steinberg
Naively quantizing the image to a palette doesn’t work. The key is to spread out the error to neighboring pixels. So if pixel (i,j) is quantized to a value that’s a little darker, you can have pixel (i,j+1) and (i+1,j) be brighter. Your job is next to implement quantizeFloyd, or Floyd-Steinberg Dithering. The pseudocode from Wikipedia (more or less) is below (updated to handle the fact that we’re returning the index):
# ... some calling code up here ..
# you'll have to set up pixel
output = new HxW that indexes into the palette
for y in range(H): for x in range(W):
oldValue = pixel[x][y]
colorIndex = quantize(oldValue,palette)
# See Beware 1! re: rows/columns
output[x][y] = colorIndex
newValue = palette[colorIndex]
error = oldValue-newValue
pixel[x+1][y] += error*7/16
pixel[x-1][y+1] += error*3/16
pixel[x][y+1] += error*5/16
pixel[x+1][y+1] += error*1/16
return output
-
(8 points) 1 coding, 2 report questions.
-
Implement Floyd-Steinberg Dithering in
quantizeFloyd.Beware:
-
Different programs, libraries, and notations will make different assumptions about whether x or y come first, and whether the image is height \(\times\) width or width \(\times\) height.
-
This algorithm, like most image processing algorithms, has literal edge cases. Keep it simple, no need to be fancy.
-
In Python, objects like lists, dictionaries, and NumPy arrays are passed by reference!
-
-
(2 points) In your own words (1-2 sentences), why does dithering (the general concept) work? Try stepping back from your computer screen or, if you wear glasses, take them off.
-
(6 points) Run this on
gallery. Put three results in your document, includingaep.jpg. Don’t adjust--num-bitsand use the defaults.
-
Resizing Images
We provided you with two folders of images, gallery/ and gallery200/. The images in gallery200 are way too small; the images in gallery are way too big! Giving you the images in all sizes would be too big, so it would be ideal if we could resize images to some size we decide when we run the program.
-
(2 points) 1 coding question.
-
Fill in
resizeToSquare(I,maxDim). Include source code in the report.If the input image is smaller than maxDim on both sides, leave it alone; if it is bigger, resize the image to fit inside a
maxDimbymaxDimsquare while keeping the aspect ratio the same (i.e., the image should not stretch). Use the opencv functioncv2.resize(and refer to documentation). You can now resize to your hearts content using the--resizetoflag.
-
Handling Color
You’ve written a version of dithering that handles grayscale images. Now you’ll write one that handles color.
-
(20 points) 2 coding, 1 report questions.
-
(4 points) Rewrite
quantize(v,palette)so that it can handle both scalarvand vectorv. Include source code in the report.If
vis an-dimensional vector it should return a set ofnvector indices (i.e., for each element, what is the closest value in the palette). You can use aforloop, but remember that: (a) broadcasting can take aM-dimensional vector andN-dimensional vector and produce aMxNdimensional matrix; and (b) many functions have an axis argument. If you are given a vector, don’t overwrite individual elements of it either! -
(8 points) Make sure that your version of
quantizeFloyd(IF,palette)can handle images with multiple channels. Include source code in the report.You may not have to do anything. If
IFis a \(H \times W \times 3\) array,IF[i,j]refers to the 3D vector at thei,jth pixel i.e.,[IF[i,j,0],IF[i,j,1],IF[i,j,2]]. You can add and subtract that vector however you want.Beware: When you get
v = IF[i,j], you are getting a reference/address/pointer! -
(8 points) Generate any four results of your choosing in color. This can be on the images we provide or on some other image you’d like. Put them in your document. For your submission, don’t adjust
--num-bits, use the default value of1. Set thegrayscaleflag to0.
-
(Optional) Gamma Correction
If you look at your outputs from a distance (unless you crank up the number of bits used), you’ll notice they’re quite a bit brighter! This is a bit puzzling. As a sanity check, you can check the average light via np.mean(reconstructed) and np.mean(original). They should be about the same.
The amount of light your monitor sends out isn’t linearly related to the value of the image. In reality, if the image has a value \(v \in [0,1]\), the monitor actually shows something like \(v^\gamma\) for \(\gamma = 2.4\) (for most values, except for some minus some technicalities near 0 – see sRGB on Wikipedia). This is because human perception isn’t linearly related to light intensity and storing the data pre-exponent makes better use of a set of equally-spaced values. However, this messes with the algorithm’s assumptions: suppose the algorithm reconstructs two pixels which are both \(0.5\) as a pixel with a \(0\) and one with a \(1\). The total amount of light that comes off the screen is \(2 * 0.5^{2.4} \approx 0.379\) and \(0 + 1^{2.4} = 1\). They’re not the same! Oof.
The solution is to operate in linear space. You can convert between linear and sRGB via linearToSRGB and SRGBToLinear. First convert the image from sRGB to linear; whenever you want to quantize, convert the linear value back to SRGB and find the nearest sRGB value in the palette; when you compute the error, make sure to convert the new value back to linear.
You should feel free to use the outputs from this implementation for your chosen result.
Colorspaces
The same color may look different under different lighting conditions. Images rubik/indoor.png and rubik/outdoor.png are two photos of a same Rubik’s cube under different illuminances.
- (2 points) Load the images and plot their R, G, B channels separately as grayscale images using
plt.imshow(). Include source code in the report. - (2 points) Then convert them into LAB color space using
cv2.cvtColorand plot the three channels again. Include source code in the report. - (2 points) Include the LAB color space plots in your report. Which color space (RGB vs. LAB) better separates the illuminance (i.e., total amount of light) change from other factors such as hue? Why?
- (4 points) Choose two different lighting conditions and take two photos of a non-specular object. Try to make the same color look as different as possible (a large distance on AB plane in LAB space).


In your report include:
- The two images, both cropped and scaled to \(256\times256\). You can use python and opencv or any other tool to resize and crop.
- Two corresponding plots of the same size (and crop) of the Luminance channel (the L in LAB).
Tasks Checklist
This section is meant to help you keep track of the many tasks you have to complete:
- NumPy Intro:
- 1.1 - Terminal Output
- Data Interpretation and Visualization:
- 2.1 - 2 images from
mysterydata2.npy - 2.2 - 2 images from
mysterydata3.npy - 2.3 -
colorMapArray - 2.4 - 9 images from
mysterydata4.npy
- 2.1 - 2 images from
- Lights on a Budget:
- 3.1 Naive Approach
- 1 -
quantize - 2 -
quantizeNaive - 3 - Quantize Runtime
- 4 - Intensity Values vs Palette Values
- 5 - Two input/output pairs:
aep.jpg+ your choice
- 1 -
- 3.2 Floyd-Steinberg
- 1 -
quantizeFloyd - 2 - Why does dithering work?
- 3 - 3 results from
gallery/includingaep.jpg
- 1 -
- 3.3 Resizing Images
- 1 -
resizeToSquare
- 1 -
- 3.4 Handling Color
- 1 -
quantize(scalar and vector) - 2 -
quantizeFloyd(multi-channel) - 3 - 4 results
- 1 -
- 3.5 Gamma Correction (optional)
- 3.1 Naive Approach
- Colorspaces:
- 4.1 - R,G,B plots
- 4.2 - L,A,B plots
- 4.3 - RGB vs LAB
- 4.4 - Two images and their Luminance plots
Canvas Submission Checklist
In the zip file you submit to Canvas, the directory named after your uniqname should include the following files:
warmups.pytests.pydither.pymystery_visualize.py